Introduction
TOF (Time-of-Flight) technology is a measurement technique that determines distance by calculating the time it takes for light to travel to an object and back. This technology is widely used in fields requiring autonomous operation, such as smartphone cameras, AR/VR, autonomous vehicles, robots, and drones.
Currently, TOF sensor measurement accuracy ranges from a few centimeters to the latest advancements achieving precision in the tens of micrometers. As a result, its applications continue to expand. This article provides a comprehensive overview of TOF technology, from its fundamental principles to the latest advancements and the challenges of practical implementation, catering to a broad audience.
Basic Concept of TOF
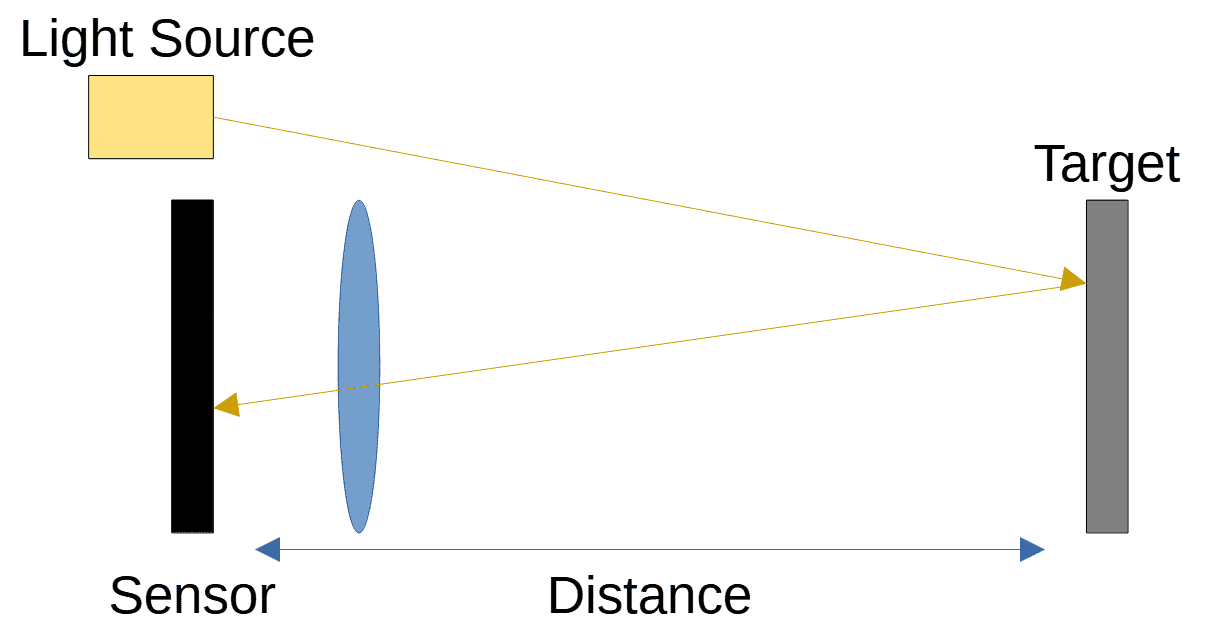
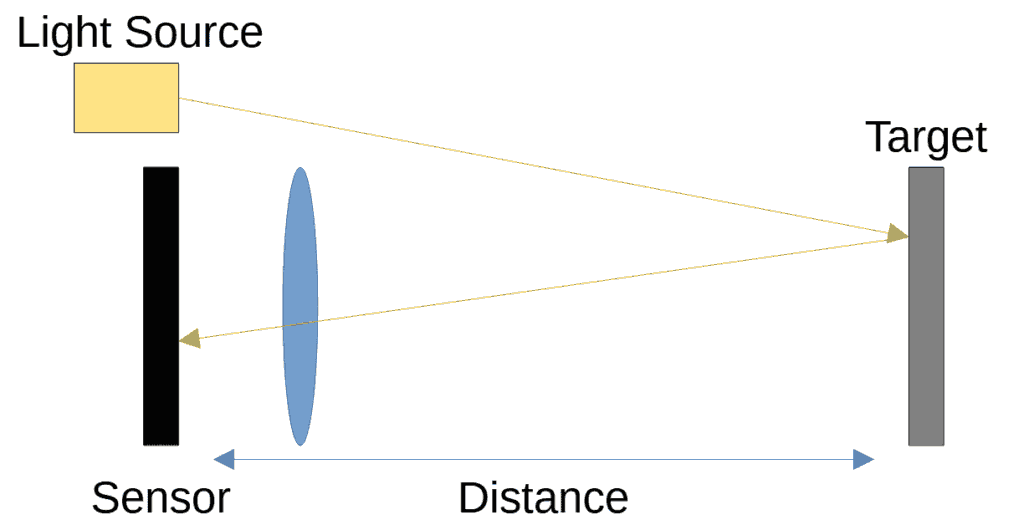
A TOF sensor emits light toward a target and calculates the distance by measuring the time it takes for the reflected light to return to the sensor. This principle enables 3D mapping and highly accurate distance measurement.
L = (c × TTOF) / 2
- L: Distance
- c: Speed of light (3×10⁸ m/s)
- TOF: Time-of-Flight (TOF)
Major Methods
There are primarily two types of TOF measurement methods:
Direct TOF
This method detects photons using a SPAD (Single Photon Avalanche Diode). It enables highly precise time measurement but requires a larger circuit area and incurs higher costs, limiting its use to specific applications. It is commonly utilized in autonomous vehicles and LIDAR (Light Detection and Ranging) systems.
Indirect TOF
This method uses optical modulation synchronized between the light source and the sensor to measure phase differences and calculate distance. Due to its high resolution and efficient use of sensor area, it is widely adopted in applications such as smartphones and consumer electronics.
Depth Image and Its Applications
What is a Depth Image?
A depth image is a two-dimensional dataset in which each pixel contains distance information to an object. Unlike conventional cameras that capture brightness and color, depth images record depth information, making them essential for 3D modeling, object detection, and robotic navigation.
Depth Image Generation Process
A TOF sensor measures distance based on the time it takes for light to travel and converts this information into a pixel-based image. The process involves the following steps:
- Illumination: Infrared or laser light is emitted toward an object.
- Reflection Detection: The sensor measures the time it takes for the reflected light to return.
- Distance Calculation: Each pixel’s distance is computed based on the time-of-flight.
- Image Rendering: The distance data for each pixel is visualized as a two-dimensional image.
Characteristics of Depth Images
- High-Precision Depth Information: Enables accurate detection of object shapes and spatial relationships.
- Real-Time Processing: Standard TOF sensors can generate depth images at 30 to 60 frames per second.
- Noise Resistance: The synchronized detection method minimizes the impact of ambient light.
Key Applications
- 3D Scanning and Modeling: Used for precise 3D data generation in architecture, healthcare, and manufacturing.
- Autonomous Driving: Provides detailed recognition of objects and terrain around vehicles.
- Robotics: Supports obstacle avoidance and path planning for autonomous robots.
- Security: Applied in facial recognition and intrusion detection systems.

Latest Trends in TOF Sensor Technology
Challenges in Achieving Higher Resolution
Overcoming 1/f Noise
Improving TOF sensor accuracy requires reducing 1/f noise. Recent research has proposed reference processing techniques to identify noise sources and cancel correlated components, significantly enhancing measurement precision.
High-Speed Charge Modulation and Charge Amplifiers
The use of high-speed charge modulation has greatly improved time-domain accuracy. Additionally, the integration of charge amplifiers eliminates non-linearity, enabling highly precise distance measurements.
Expanding Dynamic Range
To accurately measure low-reflectivity objects and specular surfaces, TOF sensors must have an expanded dynamic range. Advanced saturation detection circuits prevent overexposure from strong reflections while allowing accurate detection of weak reflected light.
Trade-Off Between Measurement Range and Accuracy
Technologies such as short-pulse lasers and on-chip delay circuits are being developed to optimize the balance between measurement range and spatial resolution.
Challenges for Practical Implementation and Application Examples
Application Examples
- Autonomous Vehicles: Used in LIDAR systems for distance measurement, contributing to obstacle detection and mapping.
- Smartphones: Integrated into portrait mode and facial recognition technologies.
- Robotics: Enables precise environmental modeling for autonomous mobile robots.
Challenges
- Cost Reduction: High-precision sensors remain expensive, requiring cost-cutting measures for mass production.
- Noise Reduction: Further advancements in low-noise technology are needed.
- Miniaturization: Smaller sensor designs are essential to expand applications, particularly in IoT devices.
Future Prospects
TOF technology is expected to continue evolving, expanding its applications across various fields. Key areas of advancement include:
- High-Frequency Operation and Short-Pulse Lasers: Essential technologies for improving spatial resolution.
- Stacked Sensors and Backside-Illuminated Sensors: Enabling both higher sensitivity and miniaturization.
- Integration with AI: Automating data analysis and enabling real-time processing.
Conclusion
TOF sensors are becoming a core technology supporting future smart devices, autonomous driving, and robotics. Through this article, we hope you have gained an understanding of TOF technology, from its fundamentals to the latest advancements, and have recognized its vast potential.

コメント