はじめに
SPAD(Single Photon Avalanche Diode)イメージセンサは、単一の光子を検出できる非常に高感度な光センサです。従来のCMOSやCCDイメージセンサでは達成できないレベルの感度と時間分解能を持ち、次世代のイメージング技術として注目されています。本記事では、SPADイメージセンサの基本原理から技術的特徴、応用分野、そして現在の課題と将来展望までを詳しく解説します。
2026年時点のSPADイメージセンサ更新ポイント
2024年以降、SPADイメージセンサは研究段階の技術というより、車載LiDAR、超高感度監視カメラ、産業計測向けに実用化が進む段階に入っています。特に重要なのは、単に「暗い場所に強い」だけでなく、距離を高速に測る、明暗差の大きい環境でも白飛びを抑える、センサ内で信号処理するという方向です。
- 車載LiDAR:Sony Semiconductor Solutionsは2025年に車載LiDAR向けの積層型dToF SPAD距離センサを発表しており、長距離検出と高速処理が注目されています。
- HDR SPAD:Canonは2025年に、重み付きフォトンカウンティングにより高ダイナミックレンジ化を狙うSPADセンサ技術を発表しています。
- 超高感度カメラ:CanonのSPADカメラは、極低照度の監視・公共インフラ・港湾などの用途で展開が進んでいます。
- dToF信号処理:2026年のレビュー論文でも、SPADアレイ、TDC、ヒストグラム処理、外乱光・干渉対策が重要テーマとして整理されています。
つまり、SPADの最新動向は「単一光子を検出できる高感度センサ」から、3Dセンシングと低照度イメージングを支える実用デバイスへ広がっている、と見るのが自然です。
1. SPADイメージセンサの基本原理
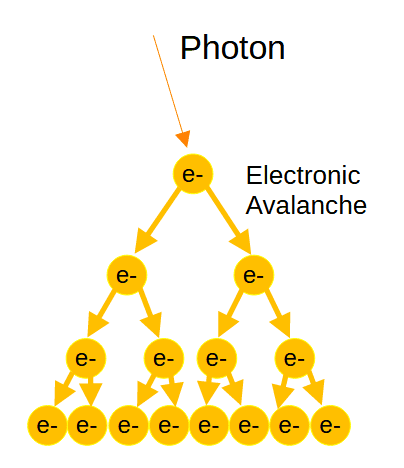
1.1 アバランシェ増倍効果とは
SPADは、半導体のアバランシェ増倍効果を利用して光子の検出を行います。
- アバランシェ増倍効果:高い電界が印加された半導体中で、光子が電子・正孔対を生成し、そのキャリアが加速されて他のキャリアを衝突電離によって生成する連鎖的な増倍現象です。
1.2 動作原理
SPADの動作は以下のステップで説明できます。
- 過電圧状態の設定:SPADは、半導体のブレークダウン電圧を超える過電圧状態で動作します。これにより、単一の光子でも雪崩増倍が起きやすくなります。
- 光子の吸収とキャリア生成:入射した光子が半導体内で電子・正孔対を生成します。
- 雪崩増倍の開始:生成されたキャリアが強い電界によって加速され、他のキャリアを生成する雪崩増倍が起こります。
- 信号の検出:この増幅された電流を検出回路でパルス信号として取り出します。
- クエンチング(雪崩の停止):雪崩現象を持続させないために、クエンチング回路で電圧を一時的に下げ、雪崩を停止させます。
1.3 クエンチング機構
- パッシブクエンチング:抵抗を用いて電流を自然に減少させ、雪崩を停止させます。回路が簡素である反面、応答速度が遅くなります。
- アクティブクエンチング:スイッチング回路を用いて強制的に電圧を下げ、迅速に雪崩を停止させます。高速応答が必要な用途に適しています。
2. SPADイメージセンサの技術的特徴
2.1 単一光子感度
SPADは、単一の光子を検出できるため、非常に高い感度を持ちます。これは、微弱な光を扱うアプリケーションで特に有用です。
2.2 高い時間分解能
- ピコ秒オーダーの時間分解能:SPADは非常に高速で応答するため、光子が検出された時間を高精度で記録できます。
- タイムコリレーテッドシングルフォトンカウンティング(TCSPC):この技術を用いて、光子到達時間の統計を取ることで、高精度な時間解析が可能です。
2.3 ピクセルアレイの構成
- 各ピクセルに個別のSPAD素子:SPADイメージセンサは、多数のSPAD素子を2次元配列したものです。
- 周辺回路の集積:クエンチング回路、カウンタ、タイミング回路などが各ピクセルに組み込まれています。
2.4 ノイズ特性
- ダークカウントレート(DCR):光がない状態でも熱励起などにより誤検出が起きます。これを低減するための材料選択や温度制御が重要です。
- アフターパルス:雪崩後にトラップされたキャリアが再度雪崩を引き起こす現象で、ノイズの一種です。時間的な窓を設けて検出を制御します。
2.5 クロストークの問題
- 光学的クロストーク:雪崩によって発生した光子が隣接ピクセルに飛び込み、誤検出を引き起こす現象です。
- 電気的クロストーク:急激な電流変化が回路にノイズを誘導し、他のピクセルの動作に影響を与えます。
- 対策:光学的にはピクセル間に遮光壁を設け、電気的には回路設計を最適化します。
3. SPADイメージセンサの応用分野

3.1 LiDAR(Light Detection and Ranging)
- 距離測定:光パルスを対象物に照射し、反射光の到達時間を測定することで距離を計算します。
- 高解像度3Dマッピング:SPADの高速応答性により、高い空間解像度で周囲の環境を3次元的に捉えることができます。
- 自動運転への応用:正確な距離情報をリアルタイムで取得することで、安全な自動運転システムの実現に寄与します。
3.2 バイオメディカルイメージング
- 蛍光寿命イメージング(FLIM):蛍光物質の発光寿命を計測することで、生体分子の状態や環境を解析します。
- 単分子検出:極めて微弱な蛍光信号を検出し、DNAやタンパク質の動態を観察します。
- 利点:非侵襲的で高感度な計測が可能であり、生体への負担を軽減します。
3.3 量子通信と量子暗号
- 量子鍵配送(QKD):単一光子レベルでの情報伝達を行い、高度なセキュリティを実現します。
- SPADの役割:高感度な単一光子検出器として、量子状態の正確な検出に不可欠です。
3.4 天文学と宇宙探査
- 高感度観測:遠方の星や銀河からの微弱な光を検出します。
- 時間分解観測:高速で変化する天体現象(例:パルサーの観測)に対応します。
4. 技術的課題と解決策
4.1 ダークカウントノイズの低減
- 低温動作:温度を下げることで熱励起を抑制し、ダークカウントレートを減少させます。
- 材料とプロセスの最適化:高品質な半導体材料と製造プロセスにより、欠陥を減らします。
4.2 高集積度化とフィルファクタの向上
- フィルファクタ:ピクセル内で有効に光を検出できる面積の割合です。
- 対策:
- マイクロレンズの使用:入射光を有効検出領域に集めます。
- 3D積層技術:回路と検出素子を垂直に配置し、面積効率を上げます。
4.3 消費電力の問題
- 省電力設計:回路の最適化や低電圧動作によって消費電力を削減します。
- パワーマネジメント:必要なときだけ回路を動作させる制御機構を導入します。
4.4 クロストークとアフターパルスの抑制
- 遮光壁の設計:ピクセル間の光学的な干渉を物理的に遮断します。
- 回路タイミングの最適化:アフターパルスが発生しにくいタイミングで動作させます。
5. 最新の研究動向と将来展望
5.1 高解像度化
- ピクセルサイズの縮小:微細加工技術の進歩により、より多くのピクセルをセンサに集積できます。
- 課題:ピクセル間のクロストークやノイズが増加するため、高精度な設計が必要です。
5.2 マルチスペクトルイメージング
- 複数の波長帯域の同時検出:異なる波長に感度を持つSPADを組み合わせ、色情報や物質特性を解析します。
- 応用:リモートセンシング、医療診断、環境モニタリングなど。
5.3 AIとの融合
- オンチップ信号処理:センサ内でデータ解析を行い、リアルタイムで有用な情報を抽出します。
- 機械学習の活用:ノイズ除去やパターン認識にAIアルゴリズムを適用します。
関連記事
6. おわりに
SPADイメージセンサは、その卓越した感度と時間分解能により、多岐にわたる分野で革新的な技術を支えています。技術的な課題は存在するものの、研究開発の進展によりこれらの問題は着実に克服されつつあります。今後もSPAD技術は、計測・通信・画像処理の分野で重要な役割を果たし、私たちの生活や産業を大きく変えていくことでしょう。
FAQ
Q. SPADイメージセンサは通常のCMOSイメージセンサと何が違いますか?
A. 通常のCMOSイメージセンサは一定時間に蓄積された電荷量を読み出します。一方、SPADは光子の到来をパルスとして検出します。そのため、暗所感度や時間分解能に強みがあります。
Q. SPADはなぜLiDARに使われるのですか?
A. LiDARでは、光を出してから戻ってくるまでの非常に短い時間差を測る必要があります。SPADは弱い戻り光を高速に検出できるため、dToF方式の距離測定と相性が良いです。
Q. SPADセンサの課題は何ですか?
A. ダークカウント、デッドタイム、クロストーク、外乱光、画素内回路による開口率低下などが課題です。実用化では、画素構造だけでなく、信号処理回路や補正アルゴリズムも重要になります。
コメント