前言
TOF(Time-of-Flight)技術是利用光的飛行時間來測量距離的技術。這項技術廣泛應用於智慧型手機相機、AR/VR、自動駕駛汽車、機器人以及無人機等需要自律運作的領域。
目前,TOF感測器的測量精度從數公分提升至最先進的數十微米,應用範圍越來越廣。本篇文章將向廣大的讀者介紹TOF技術的基本概念、最新技術進展以及實用化面臨的挑戰。
TOF 的基本概念
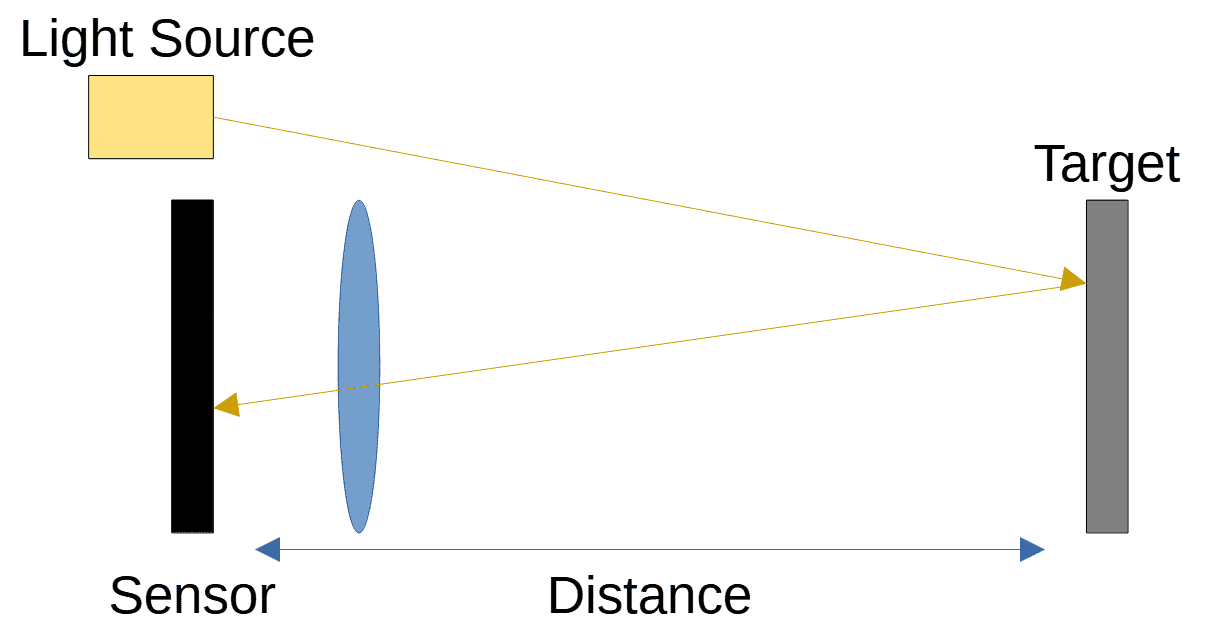
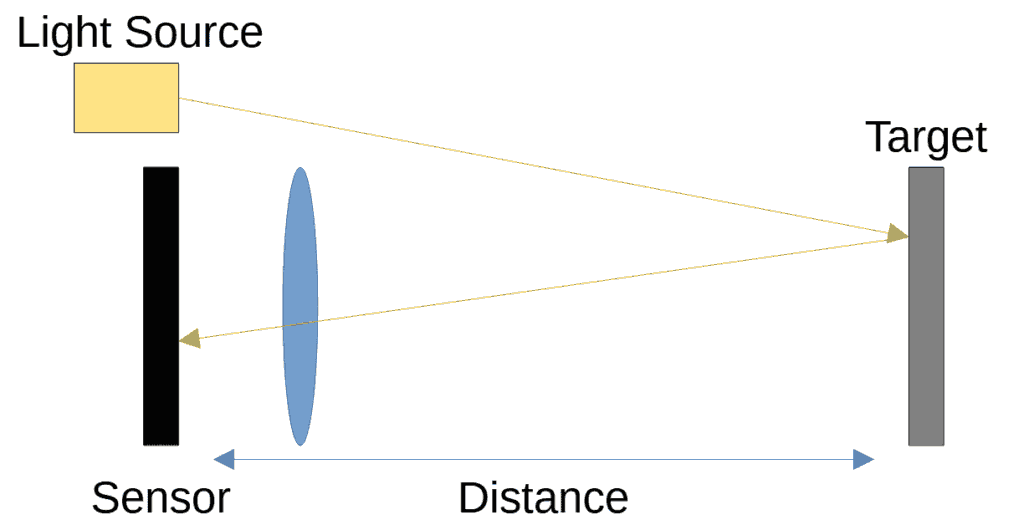
TOF 感測器是透過向目標物體發射光,並測量反射光返回所需的時間來計算距離。距離的計算使用以下公式:
L = (c × TTOF) / 2
- L: 距離
- c: 光速 (3×10⁸ m/s)
- TTOF: 光飛行時間
主要方式
主要有以下兩種方式:
Direct TOF
使用 SPAD(Single Photon Avalanche Diode,單光子雪崩二極體)檢測光子的方式。此方式可以實現高精度的時間測量,但由於電路面積較大且成本較高,因此可能僅限於特定用途。該技術廣泛應用於自動駕駛汽車和 LIDAR(光探測與測距)系統。
Indirect TOF
利用光源與感測器同步的光調制,通過測量相位差來計算距離的方式。由於具有高分辨率和面積效率,因此被廣泛應用於智慧型手機和家用設備等多種應用場景。
距離影像及其應用
什麼是距離影像
距離影像是指每個像素都包含物體到感測器距離資訊的二維數據。與普通相機記錄亮度和顏色不同,距離影像記錄的是深度資訊。這種影像格式在 3D 建模、物體檢測以及機器人的導航中發揮著重要作用。
距離影像的生成過程
TOF 感測器基於光飛行時間測量距離,並將該資訊以像素為單位轉化為影像化數據。過程包括以下步驟:
- 光源照射:向物體發射紅外線或雷射光。
- 反射光檢測:測量反射光返回感測器所需的時間。
- 距離數據計算:根據飛行時間計算每個像素的距離。
- 影像化:將每個像素的距離數據可視化為二維影像。
距離影像的特點
- 高精度的深度資訊:能準確捕捉物體的形狀與位置關係。
- リ即時性:一般 TOF 感測器以每秒 30~60 幀的速度生成距離影像。
- 抗雜訊能力:透過與光源同步的檢測方式,將環境光的影響降至最低。
主要應用領域
- 3D 掃描與建模:用於建築、醫療及製造業中精確的 3D 數據生成。
- 自動駕駛:精細辨識車輛周圍的物體與地形。
- 機器人技術:應用於自律移動機器人的障礙物避免與路徑規劃。
- 安全監控:應用於身份認證及入侵檢測系統。

TOF 感測器的最新技術動向
高解析度化的挑戰
1/f 噪聲的克服
為了提高 TOF 感測器的精度,降低 1/f 噪聲是不可或缺的。最新的研究引入了參考處理技術,通過識別噪聲源並消除相關的噪聲成分,有效地降低了干擾。
高速電荷調制與電荷放大器
利用高速電荷調制技術,可以大幅提高時間軸的測量精度。此外,透過引入電荷放大器,消除了非線性影響,實現了更精確的距離測量。
動態範圍的擴展
為了準確測量低反射率的物體或鏡面反射的目標,必須擴展感測器的動態範圍。透過使用飽和檢測電路,可以防止因強反射光導致的飽和,同時能精確測量微弱的反射光,相關技術已被開發並持續改進中。
測量範圍與精度的權衡
利用短脈衝雷射和晶片內延遲電路,可優化測量範圍與解析度之間的平衡,相關技術正在快速發展中。
實用化面臨的課題與應用案例
應用案例
- 自動駕駛汽車:作為 LIDAR 的距離測量技術,用於檢測障礙物並協助地圖繪製。
- 智慧型手機:作為支援人像模式和臉部識別功能的核心技術。
- 機器人技術:在自律移動機器人中,用於實現周圍環境的精確建模。
課題
- 成本削減:高精度的感測器仍然價格昂貴,需要進一步降低成本以實現量產化。
- 抗噪處理:需要進一步推進低噪聲技術的發展。
- 小型化:為了適應包括 IoT 裝置在內的廣泛應用,小型化成為一項重要課題。
未來展望
TOF 技術預計將在未來進一步發展,並在各個領域中的應用持續擴大。特別是以下幾個方向備受關注:
- 高頻驅動與短脈衝雷射:提升解析度的關鍵技術。
- 堆疊型感測器與背照式感測器:同時實現高靈敏度與小型化的技術。
- 與 AI 的結合:自動化數據分析並實現即時處理。
結語
TOF 感測器正逐漸成為未來智慧裝置、自動駕駛及機器人技術的核心支柱。本篇文章從 TOF 技術的基礎到最新動向進行了介紹,期望能讓您對其潛力有更深刻的理解與體會。
コメント